この記事の Awkward のバージョンは1.X.Xです
エマルションの飛跡情報(x,y,ax,ay,ax0,ay0,ax1,ay1)とする。Visual StudioでコンパイルしたROOTと、Python+numpy,awkwardで作ったバージョンを比較する。イベント数は1億(108)本とする。
Visual Studio でコンパイルしたROOT版。248秒もかかった。
#include <TFile.h> #include <TTree.h> #include <iostream> #include <random> #include <chrono> void writeTreeToFile() { TFile* file = new TFile("output.root", "RECREATE"); TTree* tree = new TTree("tree", "Tree Title"); double x, y, ax, ay, ax0, ay0, ax1, ay1; tree->Branch("x", &x, "x/D"); tree->Branch("y", &y, "y/D"); tree->Branch("ax", &ax, "ax/D"); tree->Branch("ay", &ay, "ay/D"); tree->Branch("ax0", &ax0, "ax0/D"); tree->Branch("ay0", &ay0, "ay0/D"); tree->Branch("ax1", &ax1, "ax1/D"); tree->Branch("ay1", &ay1, "ay1/D"); int seed = 0; std::mt19937 gen(seed); std::uniform_real_distribution<double> dist_pos(0, 300); // 一様分布 位置 mm std::uniform_real_distribution<double> dist_sn(0, 1); // 一様分布 SN std::normal_distribution<double> dist_ang(0, 0.4); // 正規分布 角度分布 std::normal_distribution<double> dist_dang_signal(0, 0.1); // 正規分布 角度差分布 // 1億本 for (int i = 0; i < 1 * 10000 * 10000; i++) { x = dist_pos(gen); y = dist_pos(gen); ax = dist_ang(gen); ay = dist_ang(gen); if (dist_sn(gen) < 0.2) { //シグナル成分 ax0 = ax + dist_dang_signal(gen); ay0 = ay + dist_dang_signal(gen); ax1 = ax + dist_dang_signal(gen); ay1 = ay + dist_dang_signal(gen); } else { //ノイズ成分 ax0 = ax + dist_dang_signal(gen) * 5; ay0 = ay + dist_dang_signal(gen) * 5; ax1 = ax + dist_dang_signal(gen) * 5; ay1 = ay + dist_dang_signal(gen) * 5; } tree->Fill(); } tree->Write(); file->Close(); delete file; } int main() { auto start = std::chrono::system_clock::now(); //開始時間 writeTreeToFile(); auto end = std::chrono::system_clock::now(); //終了時間 std::cout << std::chrono::duration_cast<std::chrono::milliseconds>(end - start).count() << " [msec]" << std::endl; return 0; }
次にPython+numpy,awkward版。31秒 (C++の8分の1)で終わった。
import awkward as ak import numpy as np import time start = time.time() seed=0 rs = np.random.RandomState(seed) N = 1 * 10000 * 10000 tree = ak.Array({}) tree["x"] = rs.uniform(0,300,N) tree["y"] = rs.uniform(0,300,N) tree["ax"] = rs.normal(0,0.4,N) tree["ay"] = rs.normal(0,0.4,N) tree["SN"] = rs.uniform(0,1,N)<0.2 diff_sigma = ak.where(tree["SN"], 0.1, 0.5) tree["ax0"] = tree["ax"] + rs.normal(0,1,N)*diff_sigma tree["ay0"] = tree["ay"] + rs.normal(0,1,N)*diff_sigma tree["ax1"] = tree["ax"] + rs.normal(0,1,N)*diff_sigma tree["ay1"] = tree["ay"] + rs.normal(0,1,N)*diff_sigma ak.to_parquet(tree, "tree.parquet") end = time.time() print(f"{(end-start)*1000:.0f} [msec]")
グラフも作っておく
位置分布
import matplotlib.pyplot as plt plt.hist2d(tree["x"],tree["y"],bins=[300,300],range=[[0,300],[0,300]]) plt.show()

角度分布
plt.hist2d(tree["ax"],tree["ay"],bins=[300,300],range=[[-1.5,1.5],[-1.5,1.5]]) plt.show()

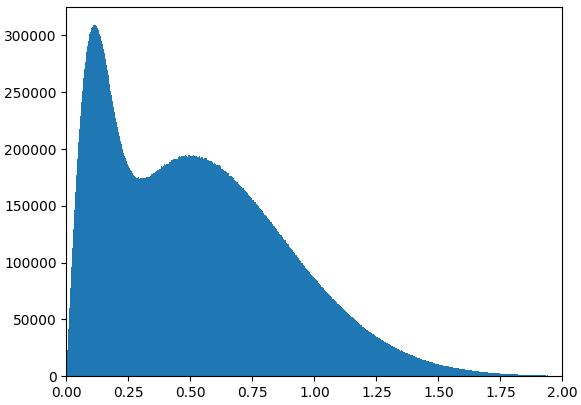
角度差分布
plt.hist(((tree["ax1"]-tree["ax"])**2+(tree["ay1"]-tree["ay"])**2)**0.5,bins=1000,range=[0,2]) plt.xlim(0,2) plt.show()